 无人驾驶系统
无人驾驶系统
环境感知
感知系统的输入设备包括摄像头、激光雷达(LiDAR)、毫米波雷达、超声波、导航系统等。这些传感器收集周围信息,为感知系统提供全面的环境数据。
控制决策
决策系统负责路线规划和实时导航。主要涉及高精度地图,以及“车联网V2X”、“智能交通系统”的支持,决策系统应用人工智能算法评估各种驾驶行为,包括信号灯、道路拥堵、行人情况等,以此规划最佳行驶路径。
执行系统
执行系统主要涉及线控底盘,包括线控转向、线控刹车、线控油门、线控换挡等。线控系统来取代司机的手和脚,并配置多个处理器组成的子系统,以此来稳定、准确地控制汽车安全行驶。
线控底盘
集成动力电池及BMS、驱动电机及控制器、线控转向系统、线控刹车系统、底盘控制器,支持CAN总线通讯,响应速度快、反馈精度高。支持遥控器控制操作。
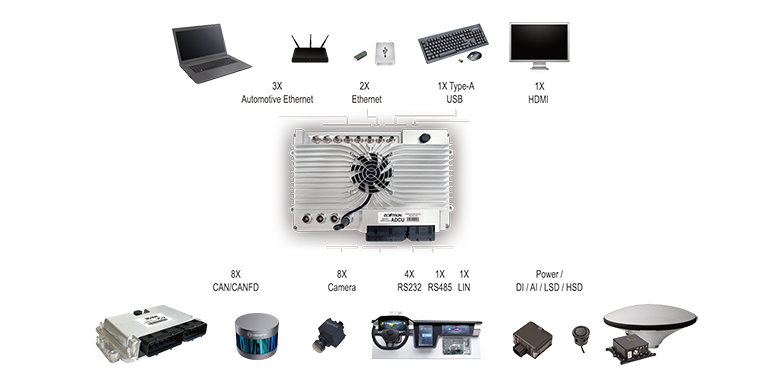
域控制器
自动驾驶域控制器ACU,负责环境感知信号采集,承载视觉图像处理融合算法、路径规划和控制决策
线控底盘控制器
用于线控底盘行走、转向、刹车及附件控制,带有完整控制系统软件。
自动驾驶控制算法
实现基本的环境感知、路径规划、自动行走、转向、刹车、避障、自动泊车等。
激光雷达(16线)
采集车辆周围物体的位置、距离、形状信息,可立体成像。
毫米波雷达( 77GHz )
前向毫米波雷达,远距离物体感知
摄像头
中长前视摄像头及广角环视摄像头,车辆周围环境感知
超声波雷达
近距离物体感知
组合导航和4G网络模块
包含导航、惯导IMU和4G网络模块
触控显示屏
用于人机交互和切换控制
线控系统改装
汽车底盘线控系统的核心是线控驱动系统、线控转向系统和线控制动系统。
线控系统是执行机构和操纵机构两者没有机械联结和机械能量的传递,驾驶人的操纵指令通过传感器件感知,再采用电信号等形式经过网络传递给执行机构与电子控制器。其中,执行机构利用外部能源完成相应的任务,而其执行的整个过程和执行结果受电子控制器的控制与监测。
线控驱动是电子控制器根据驾驶人指令来控制发动机的转速和方向,并且通过加速踏板来控制发动机输出转矩的大小。
线控转向系统由转向系统、电子控制系统和转向盘系统3部分组成,去除了转向轮与转向盘之间的机械连接装置,使得其自身与其他系统更加协调。
线控制动系统由接收单元、踏板行程传感器和制动踏板等组成,经制动控制器接收车轮传感器信号、踏板信号与制动信号来控制车轮制动。
自动驾驶系统控制策略及系统集成
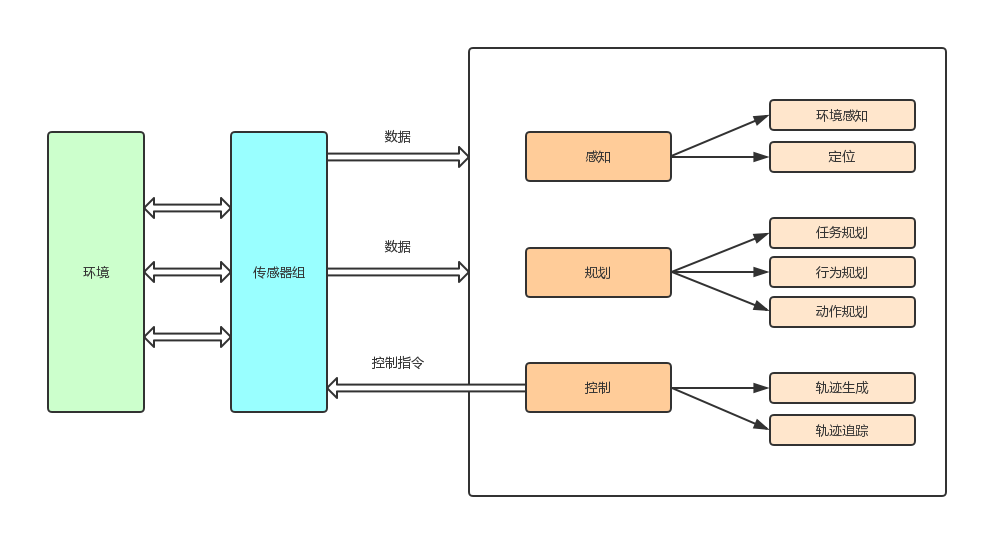
自动驾驶功能基于线控底盘和域控制器,通过传感器感知车辆周围环境,域控制器计算规划路径和决策,底盘控制器控制线控底盘执行行驶、转向、刹车等功能。为了实现这一目的,自动驾驶软件功能为以下三部分:感知、规划、控制。
感知 是指无人驾驶系统从环境中收集信息并从中提取相关知识的能力。其中,环境感知特指对于环境的场景理解能力,如障碍物的类型、道路标志、行人和车辆检测等语义分类。定位是对感知结果的后处理,通过定位功能从而帮助无人车了解相对于所处环境的位置。
规划 是指无人车为了到达某一目的地做出决策和计划的过程。对于无人驾驶车辆而言,这个过程通常包括从起始地到目的地,同时要避开障碍物,并且不断优化行车路线轨迹和行为,以保证乘车的安全舒适。
控制 是指无人车精准地执行规划好的动作、路线的能力,及时地给与车辆执行机构合适的油门、方向、刹车信号等,以保障无人车能按预期行驶。